Trio Robotik Çözümleri | SCARA, Delta Robot Kontrolü
🤖 Trio Motion — Robotik Kontrol
Trio Motion ile Robotik Otomasyon
Trio motion controllerlar, hazır kinematik dönüşümler sayesinde SCARA, Delta, eklemli (articulated) ve özel mekanik robot tiplerini standart X, Y, Z Cartesian komutlarıyla programlamanızı sağlar. Karmaşık eklem matematiğiyle uğraşmadan, tek bir kontrolörle 8 robota kadar hareket koordinasyonu kurabilirsiniz.
2–6Serbestlik Derecesi
8Robot / Kontrolör
32Takım Offseti
32Koordinat Sistemi
✅ Türkiye Yetkili Satıcı
🤖 Hazır Kinematik Dönüşümler
👁️ Vision Sistem Entegrasyonu
🔧 Devreye Alma Desteği
🎓 Motion Perfect Eğitimi
Trio Motion Robotik Kontrolü Nedir?
Trio Motion'ın robotik desteği, karmaşık mekanik eklem açılarını FRAME komutuyla otomatik olarak Cartesian X, Y, Z koordinatlarına dönüştüren dahili bir kinematik hesaplama katmanıdır. Programcı, robot kolunun eklem geometrisiyle uğraşmadan, okulda öğretilen standart X-Y-Z koordinat mantığıyla hareket yazar; tüm dönüşüm matematiği kontrolör içinde otomatik yapılır. Bu özellik MC464, MC405, MC403, MC403-Z, Euro408 ve Euro404 motion coordinatorlerde P750 Kinematic runtime lisans koduyla kullanılabilir.
Teknik Bilgi
FRAME Komutu Nasıl Çalışır?
Trio kontrolörler, robot eklem açılarını Cartesian koordinatlara çeviren tüm matematiği arka planda halleder — programcı yalnızca hedef noktayı X, Y, Z olarak tanımlar.
1
Robot Tipi Seçimi
FRAME komutuyla robotun mekanik tipi (SCARA, Delta, eklemli vb.) ve serbestlik derecesi tanımlanır. Kontrolör, o mekaniğe özgü dönüşüm matematiğini otomatik olarak devreye alır.
2
Koordinat Sistemi ve Yönelim
USER_FRAME komutuyla konveyör, kamera veya iş parçasına göre 32'ye kadar farklı koordinat sistemi tanımlanabilir. Yüksek serbestlik dereceli sistemlerde takımın yönelimi de ayrıca belirlenebilir.
3
Takım Offseti (TOOL_OFFSET)
Uç eleman (gripper, kaynak başlığı, sprey tabancası) programlama noktasından farklıysa, TOOL_OFFSET komutuyla 32 farklı takım noktası tanımlanıp anlık olarak seçilebilir.
4
Hareket Programlama
Tüm bu tanımlar tamamlandıktan sonra hareket, standart Trio MOVE/MOVEABS komutlarıyla basit X, Y, Z değerleri girilerek programlanır — eklem açısı hesaplaması gerekmez.
Desteklenen Robot Tipleri
Trio Kinematik Kütüphanesi
Trio kontrolörlerde hazır bulunan robot dönüşüm tipleri. Mekanik yapınıza uygun olanı seçip doğrudan Cartesian komutlarla programlayın.

SCARA
2 ile 6 eksen arasında, 3 serbestlik dereceli bilek seçeneğiyle. Pick-and-place, montaj, kaynak ve yapıştırma gibi yol takibi uygulamalarında kullanılır.
Delta (3 Kollu)
Yüksek hızlı pick-and-place uygulamaları için paralel bağlantılı 3 kollu robot. Karmaşık matematik kontrolör içinde çözülür; paketleme, gıda ve medikal sektöründe yaygındır.

Eklemli (Articulated)
3 ile 6 eksen formatında, en geniş pozisyon ve yönelim erişimi sunar. Kaynak, boya püskürtme, malzeme taşıma ve makine besleme uygulamalarında tercih edilir.
Karteyzen Sistemler
Standart Cartesian yapıya bilek eklenerek 6 serbestlik derecesine çıkarılır. Kaynak, frezeleme ve çizim gibi X-Y düzleminde çalışan uygulamalar için idealdir.

Lineer Paralel
İki eksenin doğrudan Cartesian yönlerde hareket ettiği mekanik yapı. Geniş erişim mesafesi ve yüksek yük kapasitesiyle paletleme uygulamalarında öne çıkar.
XY Tek Kayış
Standart XY sistemine göre motorlar arası dengeli yük dağılımı, azaltılmış kablo yönetimi ve daha küçük yerleşim alanı sunar. Yüksek yük taşıyan paletleme hatlarında tercih edilir.
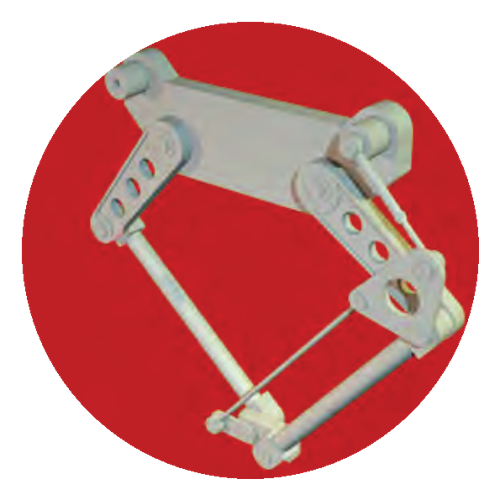
Paralel Kol
Ağırlığın büyük kısmı tabanda olduğu için yüksek hızlı pick-and-place ve montaj uygulamalarına uygundur. Yatay veya dikey montaj seçeneğiyle esnek yerleşim sağlar.
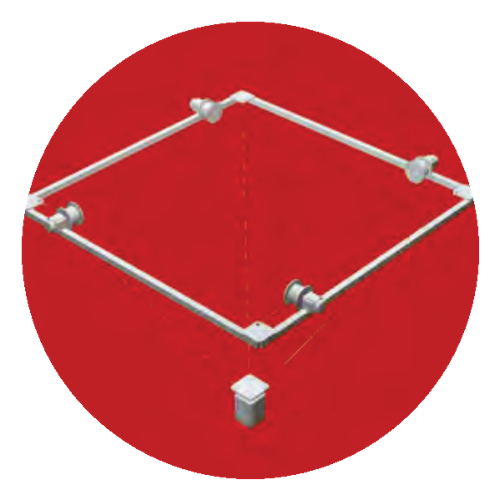
Tel Konumlandırma
3 ile 6 tel kullanılarak takımın Cartesian X, Y, Z uzayında konumlandırıldığı özel sistem. Tipik olarak stadyum kamera "fly-over" uygulamalarında kullanılır.
Gelişmiş Özellikler
Robot Programlamayı Kolaylaştıran Araçlar
Trio kontrolörler, robot uygulamalarında geliştirme süresini kısaltan bir dizi hazır komut ve entegrasyon seçeneği sunar.
32 Koordinat Sistemi
USER_FRAME komutuyla konveyör, kamera veya iş parçasına göre farklı koordinat sistemleri tanımlanır.

32 Takım Offseti
TOOL_OFFSET komutuyla birden fazla uç eleman noktası tanımlanıp anlık olarak seçilebilir.
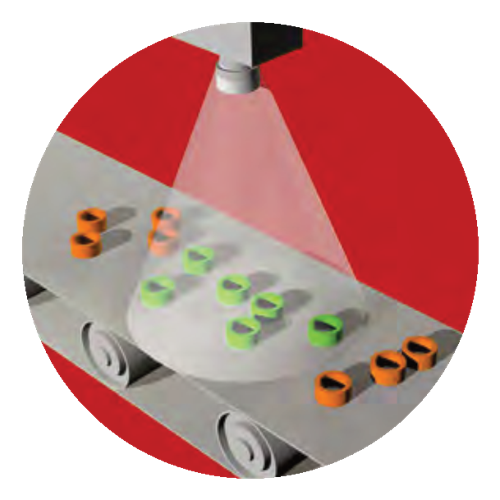
Vision Entegrasyonu
Modbus (RTU/TCP) veya EtherCAT üzerinden kamera sistemleriyle koordinat aktarımı yapılabilir.
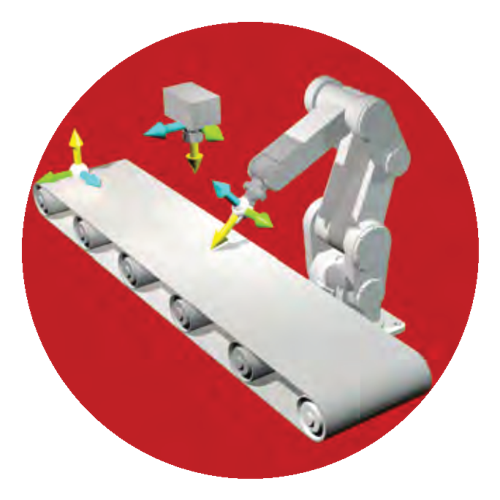
Konveyör Senkronizasyonu
SYNC komutu, hareketli konveyör üzerindeki bileşene senkronize olup işlem sonrası otomatik ayrılmayı sağlar.

Teach Sistemleri
Robot jog edilerek veya elle yönlendirilerek öğretilen profiller SD karta yüzlerce adet kaydedilebilir.
Uygulama Örnekleri
Sahada Trio Robotik Kontrolü
Kinematik dönüşüm desteği, robot uç elemanının türünden bağımsız olarak aynı basit Cartesian programlama mantığıyla çalışır.

Kaynak Uygulamaları
Eklemli veya Karteyzen Sistemler robot tipleriyle hassas yol takibi gerektiren kaynak işlemlerinde, taught (öğretilmiş) profiller SD kartta saklanarak tekrar tekrar kullanılabilir.

Boya & Sprey Uygulamaları
TOOL_OFFSET ile tanımlanan sprey tabancası ucu, jogging veya yol öğretimi yöntemiyle programlanarak tutarlı, tekrarlanabilir kaplama sonuçları elde edilir.
Uyumlu Kontrolörler
Robotik Destek Hangi Trio Kontrolörlerde Var?
Kinematik dönüşüm özelliği aşağıdaki Trio motion coordinator modellerinde, P750 Kinematic runtime lisans koduyla kullanıma açılır.
| Model | Maks. Robot / Kontrolör | Robotik Destek |
|---|---|---|
| Flex-6X Nano | 8 robota kadar | ✓ P750 ile aktif |
| MC6N-ECAT | 8 robota kadar | ✓ P750 ile aktif |
| MC464 | 8 robota kadar | ✓ P750 ile aktif |
| MC405 | 8 robota kadar | ✓ P750 ile aktif |
| MC403 / MC403-X | 8 robota kadar | ✓ P750 ile aktif |
| MC403-Z | 8 robota kadar | ✓ P750 ile aktif |
| Euro408 | 8 robota kadar | ✓ P750 ile aktif |
| Euro404 | 8 robota kadar | ✓ P750 ile aktif |
* Uygulamanıza uygun model ve lisans kodu seçimi için teknik destek hattımıza ulaşabilirsiniz.
Sıkça Sorulan Sorular
Trio Robotik Çözümleri Hakkında Merak Edilenler
Trio motion controller robotik uygulamalar için uygun mudur?
▼
Evet. Trio kontrolörlerde hazır kinematik dönüşümler (FRAME komutu) sayesinde karmaşık eklem açılarıyla uğraşmadan, standart X, Y, Z Cartesian komutlarıyla robot mekaniklerini kolayca çalıştırabilirsiniz. 2'den 6 serbestlik derecesine kadar SCARA, Delta, eklemli (articulated) robot, Karteyzen Sistemler, paralel kol ve XY tek kayışlı sistemler gibi birçok robot tipi desteklenir; bir kontrolörde 8 robota kadar, 32 farklı takım offseti ve 32 kullanıcı koordinat sistemi tanımlanabilir.
FRAME komutu tam olarak ne yapar?
▼
FRAME komutu, robotun mekanik eklem açılarını Cartesian X, Y, Z koordinatlarına dönüştüren kinematik hesaplamayı tanımlar. Programcı, hangi robot tipiyle çalıştığını (SCARA, Delta, articulated vb.) FRAME'e bildirir; kontrolör bu bilgiye göre karmaşık dönüşüm matematiğini arka planda otomatik olarak yürütür. Yüksek serbestlik dereceli sistemlerde takımın hangi yöne baktığı (oryantasyon) da ayrıca tanımlanabilir.
Bir kontrolörle kaç robot aynı anda kontrol edilebilir?
▼
Bir Trio kontrolöründe FRAME_GROUP komutuyla 8 farklı gruba kadar eksen ataması yapılabilir; her grup kendi robot tipini seçebilir. Bu sayede tek bir kontrolörden 8 robota kadar bağımsız veya senkronize şekilde yönetilebilir.
Robot sistemine vision (görüntü işleme) kamerası entegre edilebilir mi?
▼
Evet. Vision sistemleri, konveyör üzerindeki bileşenlerin koordinatlarını Trio kontrolörüne Modbus (RTU veya TCP) ya da EtherCAT üzerinden aktarabilir; üretici bazlı özel UDP protokolüyle de entegrasyon mümkündür. Bu sayede robot, kamera görüş alanındaki seçilen bileşene hareket edecek şekilde programlanabilir.
Mekaniğim listedeki robot tiplerinden hiçbirine uymuyorsa ne olur?
▼
Mevcut FRAME dönüşümleri sizin mekanik konfigürasyonunuza uymuyorsa, ihtiyacınıza özel ek FRAME tanımları geliştirilmesi mümkündür. MotMotion Teknoloji olarak bu tür özel kinematik uygulamalar için Trio ile birlikte teknik danışmanlık sağlıyoruz.
Türkiye'de Trio robotik çözümleri için teknik destek alabilir miyim?
▼
Evet. MotMotion Teknoloji olarak Trio Motion'ın Türkiye yetkili satıcısı ve teknik destek noktasıyız. Robot kinematik seçimi, P750 lisans kodu, vision entegrasyonu ve devreye alma konularında İzmir ofisimizden veya WhatsApp hattımızdan destek sağlıyoruz.
Robotik Projenizi Birlikte Tasarlayalım
Robot tipi seçimi, kinematik lisanslama ve devreye alma desteği için MotMotion uzman ekibiyle hemen iletişime geçin.